
Un motore elettrico non si giudica solo dai kW dichiarati: contano il modo in cui il campo magnetico genera coppia, il tipo di macchina rotante scelto e il lavoro dell’elettronica di potenza che lo controlla. In questa guida metto ordine tra principi di funzionamento, architetture più diffuse e relazione reale con la ricarica, così è più facile capire perché due auto con numeri simili possono comportarsi in modo molto diverso su strada. Mi interessa soprattutto la prospettiva pratica: cosa cambia nell’uso quotidiano, cosa incide sulle prestazioni e dove nascono i compromessi.
Le tre cose che contano davvero sono coppia, controllo e calore
- La coppia nasce dall’interazione tra statore, rotore e inverter, non dalla sola batteria.
- Le architetture che trovi oggi vanno dall’asincrona alla sincrona a magneti permanenti, fino alle soluzioni a riluttanza.
- Su strada vince chi mantiene efficienza alta anche quando la temperatura sale.
- La ricarica alimenta la batteria; il gruppo di trazione entra in gioco dopo, durante la marcia.
- Nelle auto più sportive conta molto la calibrazione software, spesso più del dato di potenza massima.
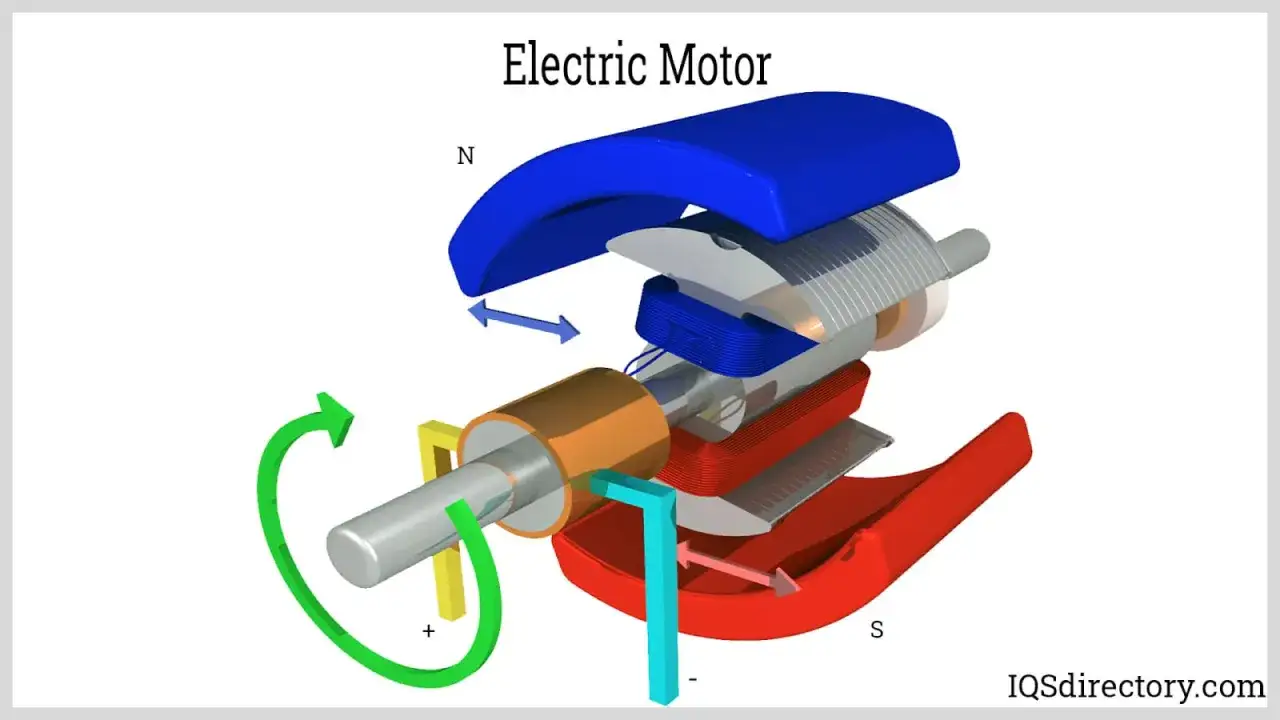
Come nasce la coppia in una macchina rotante
La parte davvero interessante non è “far girare” un asse, ma creare un disallineamento controllato tra due campi magnetici. Lo statore, cioè la parte fissa con gli avvolgimenti, genera un campo rotante; il rotore cerca di seguirlo e da questa rincorsa nasce la coppia. In pratica, la rotazione non è un effetto collaterale: è il risultato cercato dal progetto elettromagnetico.
Qui entra in scena l’inverter, che modula tensione e frequenza per decidere quanto velocemente ruota il campo. È lui a dare al sistema quella risposta immediata che su un’auto elettrica si percepisce come spinta continua e lineare. Quando il controllo è ben tarato, la coppia arriva quasi da fermo; quando la velocità aumenta, il software deve anche gestire la contro-elettromotrice, cioè la tensione che il motore genera mentre gira e che tende a opporsi all’alimentazione.La conseguenza pratica è semplice: il comportamento non dipende solo dalla meccanica, ma da come la macchina viene pilotata. Ed è proprio da qui che si capisce perché due unità con specifiche simili possono dare sensazioni opposte, una più piena ai bassi e un’altra più brillante in allungo.
Le famiglie che oggi contano davvero sulle auto elettriche
Quando confronto le architetture, io parto sempre dalla stessa domanda: quale compromesso serve davvero al progetto? NREL osserva che oggi la maggior parte delle trazioni in produzione usa macchine sincrone a magneti permanenti, ma non significa che siano l’unica scelta sensata. Ogni famiglia ha un equilibrio diverso tra costo, efficienza, complessità e sensibilità al calore.
| Famiglia | Come genera la coppia | Punti forti | Limiti | Dove la incontro più spesso |
|---|---|---|---|---|
| DC con spazzole | Commutazione meccanica tramite collettore e spazzole | Semplice da capire e da pilotare | Usura, manutenzione, efficienza meno interessante | Applicazioni storiche o piccole utenze, quasi mai nella trazione moderna |
| Asincrona a induzione | Il rotore segue il campo rotante grazie alle correnti indotte | Robusta, priva di magneti, buona tolleranza ai regimi alti | Può perdere qualcosa in efficienza e densità di coppia rispetto alle sincrone migliori | Auto che puntano su robustezza e contenimento dei materiali critici |
| Sincrona a magneti permanenti | I magneti sul rotore seguono il campo dello statore | Alta efficienza, ottima densità di potenza, risposta pronta | Costo dei magneti, dipendenza da terre rare, attenzione alla temperatura | Molte EV moderne, soprattutto dove servono compattezza e prestazioni |
| Sincrona a riluttanza | Il rotore si allinea verso il percorso di minore riluttanza magnetica | Niente magneti, buon rendimento, manutenzione ridotta | Controllo più fine richiesto, coppia specifica non sempre al livello delle migliori PMSM | Soluzioni orientate a efficienza e riduzione dei costi dei materiali |
| Riluttanza commutata | La coppia nasce dalla sequenza di eccitazione delle fasi e dalla posizione del rotore | Struttura robusta, rotore semplice, buona resistenza termica | Più rumore, più vibrazioni, controllo complesso | Applicazioni dove la semplicità meccanica pesa più del comfort acustico |
Il Dipartimento dell’Energia statunitense segnala che la riluttanza commutata resta interessante proprio per semplicità e robustezza, ma oggi paga ancora il prezzo di rumore, vibrazioni e controllo più complicato. È un promemoria utile: non esiste una soluzione “migliore” in assoluto, esiste quella più coerente con il veicolo che vuoi costruire. Se devo sintetizzare, per un’auto sportiva guardo prima la sincrona a magneti permanenti, poi eventuali varianti ibride o magnet-free quando il progetto vuole alleggerire la dipendenza da materiali critici.
Da qui il passo successivo è quasi obbligato: capire come rendimento e temperatura trasformano un buon progetto in un progetto davvero convincente.
Rendimento, calore e raffreddamento cambiano il risultato reale
Su una scheda tecnica si cita spesso il picco, ma nella vita vera conta la curva di efficienza. Un gruppo di trazione moderno può lavorare molto bene in un intervallo ampio di carico, spesso con valori oltre il 90% nella zona più favorevole; il punto critico arriva quando la temperatura cresce e il sistema deve proteggersi. A quel punto l’elettronica riduce la coppia, anche se sulla carta ci sarebbe ancora margine.
Le perdite principali sono tre: rame negli avvolgimenti, ferro nel pacco statorico e calore nell’elettronica di potenza. Per limitarle, i costruttori usano raffreddamento a liquido, circuiti integrati nel carter, a volte persino olio nebulizzato sulle parti più sollecitate. È una scelta meno scenografica di un numero di potenza alto, ma molto più concreta quando si guida forte per diversi minuti di fila.
Qui entra anche il tema del feeling sportivo. Io distinguo sempre tra erogazione “esplosiva” e erogazione “costante”: la prima impressiona nel primo colpo di acceleratore, la seconda fa la differenza nelle riprese ripetute, nei passi di montagna e in autostrada d’estate. Se il raffreddamento è sottodimensionato, la macchina resta brillante solo all’inizio. Se il progetto è solido, la spinta rimane coerente e la guida diventa molto più credibile.
Per questo il calore non è un dettaglio laterale: è il confine tra una trazione che promette e una trazione che regge davvero. E da lì si arriva subito al tema che molti confondono con il motore, cioè la ricarica.
Ricarica e trazione non vanno confuse
Questo è il punto che chiarisce molti equivoci. La ricarica serve a riempire la batteria; il gruppo motopropulsore usa quell’energia per muovere le ruote. I due processi sono collegati, ma non sono la stessa cosa. In ricarica AC, la corrente alternata arriva al caricatore di bordo, che la converte in continua per il pacco batteria. In ricarica DC, invece, la corrente arriva già pronta e il passaggio è più diretto.Detto in modo ancora più pratico, il percorso dell’energia cambia così:
- rete elettrica - caricatore - batteria - inverter - motore, nelle ricariche AC;
- rete elettrica - colonnina DC - batteria - inverter - motore, nelle ricariche rapide in corrente continua.
La potenza della colonnina non va confusa con la potenza del gruppo di trazione. Una wallbox domestica da 7,4 kW o 11 kW è perfetta per la notte e per l’uso quotidiano, mentre una ricarica rapida da 50 kW o più serve quando vuoi recuperare autonomia in una sosta breve. In DC si vedono valori anche molto più alti, ma il limite vero resta sempre il profilo di carica dell’auto: temperatura della batteria, percentuale di carica residua e capacità del sistema di raffreddamento fanno più differenza del numero “massimo” stampato sulla brochure.
Questa distinzione è importante anche per chi guarda a un’auto sportiva elettrica: la ricarica veloce non rende più potente il motore, ma può rendere molto più usabile la vettura nel mondo reale. E a quel punto diventa sensato chiedersi quale architettura sia davvero la più adatta al proprio uso.
Come scelgo l’architettura giusta in base all’uso
Quando devo dare un giudizio pratico, non parto dal mito tecnologico ma dallo scenario d’impiego. La stessa macchina può essere perfetta su una compatta da città e meno convincente su una sportiva pesante che deve sostenere accelerazioni ripetute. Per questo io ragiono per priorità, non per etichette.
| Esigenza principale | Scelta più coerente | Perché funziona |
|---|---|---|
| Efficienza e guida fluida | Sincrona a magneti permanenti o sincrona a riluttanza | Ottimo rendimento e risposta molto lineare |
| Ridurre la dipendenza da magneti | Asincrona o soluzioni a riluttanza | Meno materiali critici e struttura più semplice |
| Uso sportivo e ripetizione delle prestazioni | Sincrona a magneti permanenti con raffreddamento robusto | Densità di potenza alta e spinta pronta, se il termico è ben gestito |
| Robustezza meccanica e costi contenuti | Riluttanza commutata o architetture magnet-free | Rotore semplice e buona tolleranza a condizioni severe |
In molte piattaforme moderne vedo anche architetture miste: un asse più efficiente per la marcia di tutti i giorni e un secondo gruppo pensato per il supporto in accelerazione o per la trazione integrale. È una soluzione elegante perché permette al software di decidere chi lavora, quando e quanto. Per il guidatore il risultato è meno spettacolare sulla carta, ma molto più intelligente nell’uso reale.
Se devo essere netto, il progetto migliore non è quello che promette il valore più alto in un grafico, ma quello che conserva consistenza quando cambiano temperatura, velocità e stile di guida. Ed è questa la logica che uso anche per chiudere il cerchio tra tecnica e piacere di guida.
I tre segnali che mi fanno fidare di una trazione elettrica sportiva
Il primo segnale è la continuità della coppia: non mi interessa solo lo scatto iniziale, ma la capacità di ripeterlo senza che il sistema si sgonfi dopo pochi minuti. Il secondo è la gestione termica: se un’auto mantiene la stessa voce dopo un tratto allegro, vuol dire che il progetto è stato pensato bene. Il terzo è la curva di ricarica, perché nel mondo reale la sportività deve convivere con i tempi morti e con l’uso quotidiano.Se devo ridurre tutto a una sola idea, è questa: la macchina rotante conta, ma il risultato finale nasce dall’equilibrio tra architettura, elettronica e gestione termica. È per questo che due vetture con la stessa batteria e numeri di picco vicini possono avere caratteri opposti: una più brillante nei sorpassi ripetuti, l’altra più parsimoniosa in autostrada, un’altra ancora più lineare e silenziosa in città.
Quando valuto un progetto, guardo prima la costanza della coppia, poi la curva di ricarica e solo alla fine il dato di potenza massima. È lì che si capisce se questa tecnologia è stata pensata per la guida reale o solo per impressionare in scheda tecnica.